Hor + Pos tab
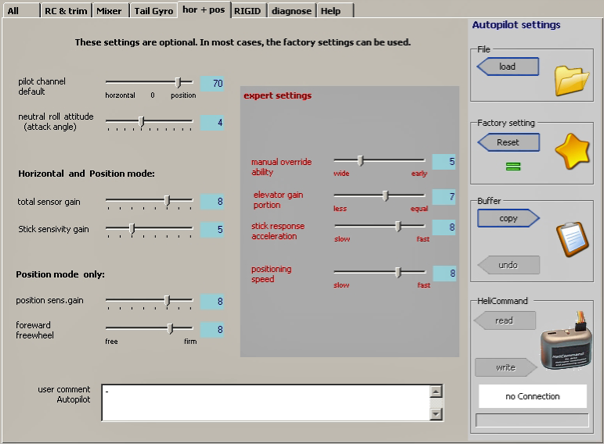




Settings on this page are optional. Usually, default values work pretty well.
Pilot channel default value: It will be used to define the operating mode (Off, Horizontal, Position) of Helicommand if the "Pilot" channel is not connected to the receiver. The fixed value defines the "assistance gain" . If experiencing oscillations, reduce the value. This setting is independent of the "Failsafe" value which will be automatically applied should there be a break in the radio transmission (FM/PPM) and which is always 65% in "Position" mode.
Neutral roll attitude: Defines the vertical inclination, while hovering, needed to balance the parasitic effect of the tail rotor. Modify only for light helis with a low rotor speed. In that case, enter the hovering inclination angle.

Total sensor gain: Related to roll and nick axis. The effect is combined with the max travels set in the "Mixer" tab. Decrease the value in case of oscillations. Increase the value if locking is poor in "Position" mode. However, do it carefully only in small increments.


Stick sensitivity gain: Same as a "Expo" function. Use low values to increase the effect (inexperienced pilots).

Position sensor gain: The closer the sensor is to the ground and the lower should be this gain to avoid violent corrections. But a low value will lead to poor locking while up in altitude. Need to find a fair compromise. In fact, usually better to keep a high value and to take-off and land in the "Horizontal" mode.

Optionnal "Expert" settings: See previous page for details.


"Foreward freewheel": Only for "Position" mode. Defines the level of freedom on the longitudinal axis. See previous page for details.