Tail Gyro tab




Settings on this page are optional and concern only the internal tail-gyro with the exception of the configuration of the "Aux" channel. Otherwise, nothing to do if using an external tail gyro. Generally, the default values work pretty well. However, it might be interesting to adjust the "Torque compensation" cursor as it can definitely improve performances.
Gyro gain: This setting will only be used if the "Aux" channel is not connected to the receiver or has been assigned to the "Auto-Trim" function. Use as a cursor on the radio to set gain and mode of operation of the internal gyro. If you get tail oscillations, then reduce the value by bringing the cursor toward the centre.
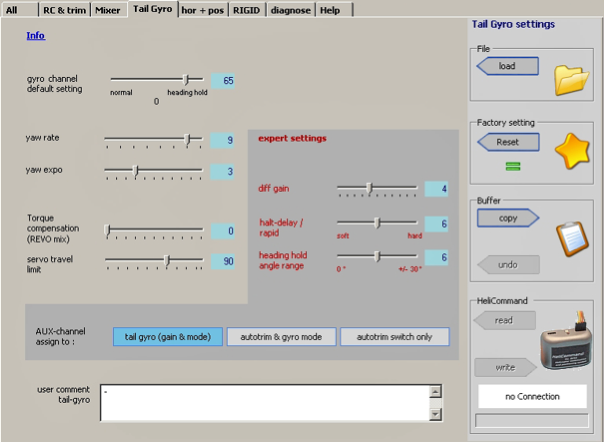

Yaw rate: Adjust the yaw stick sensitivity and defines the rotation speed.

Yaw expo: Decreases the sensitivity of the yaw stick around the neutral value. Effect increases with higher values.
Torque compensation: Provides a mixing of collective pitch onto the yaw. Improves performances of the gyro by anticipating torque effects resulting from pitch variations. Can be used even in "HH" mode. Will only work properly if pitch direction and rotor rotation have been set correctly. A good average value is "4".

Servo travel limit: Adjust to avoid mechanical locking at the end of servo travel. This setting is independent of trim values on the radio ad of the "Auto-Trim" function.

Configuration of the "Aux" channels: If using an external gyro, then the only option is "Autotrim only". See previous page for details.

Optionnal "Expert" settings: Refer to the previous page for details.